David Betaille
Directeur de Recherche
Bouguenais
Bâtiment: Building: DARCY
Allée des Ponts et Chaussées
Route de Bouaye
CS 5004
44344 Bouguenais Cedex
Bureau: Office: 24
{kind=link}
David Betaille
Directeur de Recherche
Disciplines scientifiques : traitement du signal et de l'information, mathématiques appliquées, statistiques, automatique et robotique
---
Domaine d'application : positionnement par satellites et navigation, géolocalisation de véhicules et autres mobiles pour les systèmes de transport intelligent
---
HdR Université de Nantes
---
PhD University College London (geomatics engineering)
---
Représentant de l'Université Gustave Eiffel à l'ED 641 MaSTIC
Mes dernières références
My latest references
Publications
HDR, PhD
Habilitation à Diriger les Recherches : David F. Bétaille, « Localisation de véhicule par satellites, couplée à la navigation à l’estime et aux données cartographiques », Université de Nantes, Avril 2014
Thèse de doctorat : David F. Bétaille, « Assessment and Improvement of the Capabilities of a Window Correlator to Model GPS Multipath Phase Errors », University of London, February 2004
Ouvrage scientifique, chapitre d’ouvrage
Françoise Duquenne, Serge Botton, François Peyret, David Bétaille, Pascal Willis, GPS – localisation et navigation par satellites, 2ème édition, Hermès-science Lavoisier, ISBN : 2-7462-1090-8, 2005 : co-auteur du chap. 3, « Le positionnement dynamique », pp. 161-252, et auteur, dans le chap. 4, « Les applications autres que la localisation », d’une partie consacrée à la détermination d’attitude, pp. 259-271
Guidelines « Performance assessment of positioning terminals », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en mars 2018.
Handbook « Assessment of positioning performance in ITS applications », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en juin 2017.
White Paper « Better use of Global Navigation Satellite Systems for safer and greener transport », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en septembre 2015.
Coordination d’ouvrage
R. Toledo-Moreo, D. Bétaille and M.-A. Sotelo, coordination & guest editorial of the special issue on IEEE IV 2012 workshops – part 1 of 2, IEEE Intelligent Transportation Systems Magazine, Vol. 5, No. 3 – Fall 2013
Articles de revues à comité de lecture
Revues internationales
M. Fontaine, A. Coiret, J. Cesbron, V. Baltazart and D. Bétaille, In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions, MDPI Sensors, 2021, 21(20), 6874, doi:10.3390/s21206874
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, GNSS Integrity Monitoring Schemes for Terrestrial Applications in Harsh Environments, IEEE ITS Magazine, Special Issue, Vol. 12, No. 3, pp. 81-91 – Fall 2020
B. Flade, J. Eggert, A. Koppert, G. Velez, O. Otaegui, A. Das, G Dubbelman and D. Bétaille, Vision-Enhanced Low-Cost Localization in Crowdsourced Maps, IEEE ITS Magazine, Special Issue, Vol. 12, No. 3, pp. 70-80 – Fall 2020
S. Strataki, D. Bétaille and U. Hugentobler, Assessment of dynamic geo-positioning using multi-constellation GNSS in challenging environments, Advances in Intelligent Systems and Computing – May 2019
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, GNSS Position Integrity in Urban Environments : A Review of Literature, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. PP, No. 99, pp. 1-17 – January 2018
F. Taia-Alaoui, D. Bétaille and V. Renaudin, Pedestrian dead reckoning navigation with the help of A*-based routing graphs in large unconstrained spaces, Hindawi Wireless Communications and Mobile Computing, ISSN : 1530-8677, doi:10.1155/2017/7951346, pp. 1-10 – July 2017
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and F. Godan, Improving accuracy and integrity with a probabilistic Urban Trench modeling, Navigation, ISSN : 0028-1522, Vol. 63, No. 3, pp. 283-294 – Fall 2016
D. Bétaille, F. Peyret and M. Voyer, Applying Standard Digital Map Data in Map-aided, Lane-level GNSS Location, Journal of Navigation, ISSN : 0373-4633, doi:10.1017/S0373463315000132, Vol. 68, No. 5, pp. 827-847 – September 2015
F. Peyret, D. Bétaille, C. Piñana-Diaz, R. Toledo-Moreo, A.-F. Gómez-Skarmeta and M. Ortiz, GNSS autonomous localization : Non-Line-Of-Sight satellite detection based on digital maps of city environments, IEEE Robotics and Automation Magazine, Vol. 21, No. 1 – March 2014
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and L. Fontenay, A new modelling based on urban trenches to improve GNSS positioning Quality of Service in cities, IEEE Intelligent Transportation Systems Magazine, Vol. 5, No. 3 – Fall 2013
S. Peyraud, D. Bétaille, S. Renault, M. Ortiz, F. Mougel, D. Meizel and F. Peyret, About Non-Line-Of-Sight Satellite Detection and Exclusion in a 3D Map-Aided Localization Algorithm, Sensors, ISSN : 1424-8220, Vol. 13, pp. 829-847 – January 2013
D. Bétaille and R. Toledo-Moreo, Creating enhanced maps for lane-level vehicle navigation, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. 11, No. 4, pp. 786-798 – December 2010
R. Toledo-Moreo, D. Bétaille and F. Peyret, Lane level integrity provision for navigation and map-matching with GNSS, dead-reckoning and enhanced maps, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. 11, No. 1, pp. 100-112 – March 2010
R. Toledo-Moreo, D. Bétaille, F. Peyret and J. Laneurit, Fusing GNSS, dead-reckoning and enhanced maps for road vehicle lane-level navigation, IEEE Journal of selected topics in signal processing, ISSN : 1932-4553, Vol. 3, No. 5, pp. 798-809 – October 2009
M. Schlingelhof, D. Bétaille, Ph. Bonnifait and K. Demaseure, Advanced positioning technologies for co-operative systems, IET Intelligent Transport Systems revue, ISSN : 1751-956X, Vol. 2, No. 2, pp. 81-91 – June 2008
M.-A. Zamora-Izquierdo, D. Bétaille, F. Peyret and C. Joly, Comparative study of Extended Kalman Filter, Linearised Kalman Filter and Particle Filter applied to low-cost GPS-based hybrid positioning system for land vehicles, Int. J. Intelligent Information and Database Systems, ISSN : 1751-5858, Vol. 2, No. 2, pp.149-166 – March 2008
D. Bétaille, P. Cross and H.-J. Euler, Assessment and improvement of the capabilities of a window correlator to model GPS multipath phase errors, IEEE Transactions on Aerospace and Electronic Systems, ISSN : 0018-9251, Vol. 42, No. 2, pp. 705-717 – April 2006
F. Peyret, D. Bétaille and G. Hintzy, High-precision application of GPS in the field of real-time equipment positioning, Automation in Construction, ISSN : 0926-5805, Vol. 9, No. 3, pp. 299-314 – May 2000
P. Cross, S.J. Edwards, J. Barnes and D. Bétaille, A methodology for benchmarking real time GPS, Survey Review, ISSN : 0039-6265, Vol. 35, No. 272, pp. 163-174 – April 1999
Revues nationales
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion (FDE), URSI-Revue d’Electricité et d’Electronique, ISSN : 2270-7042, Geolocation and Navigation in Space and Time, https://ursi-france.sciencesconf.org/187025 – March 2018
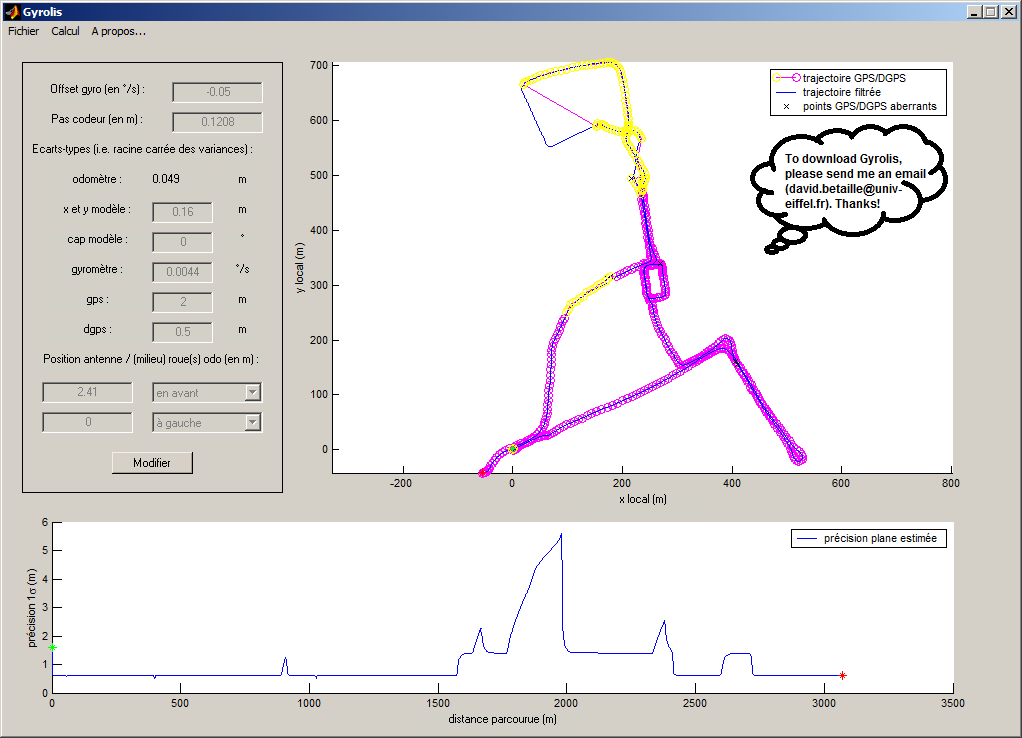
D. Bétaille, Gyrolis : logiciel de localisation de véhicule en post-traitement par couplage GPS - gyromètre - odomètre, Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 272, pp. 75-87 – Octobre-Novembre 2008
C. Joly, D. Bétaille et F. Peyret, Étude comparative des techniques de filtrage non-linéaire appliquées à la localisation 2D d’un véhicule en temps réel, Revue Traitement du Signal, ISSN : 0765-0019, Vol. 25, No. 3, pp. 201-220 – Mai-Juin 2008
D. Bétaille et K.-I. Fujino, Localisation des engins de viabilité hivernale, note technique du Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 219, pp. 75-77 – Janvier-Février 1999
F. Peyret, D. Bétaille et Ch. Lemaire, Mise en service de la station d’étude des systèmes de localisation SESSYL, Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 205, pp. 105-109 – Septembre-Octobre 1996
Articles sans comité de lecture
Articles de magazines technico-professionnels internationaux
D. Bétaille, S. Miquel, F. Godan and F. Peyret, 3D-city-model-aided GNSS accurate positioning with integrity provision using simplified geometry of buildings, Coordinates – September 2015
M. Ortiz, V. Renaudin, F. Peyret and D. Bétaille, Using a reference vehicle for solving GNSS localization challenges, Inside GNSS – September-October 2013
F. Peyret, D. Bétaille, G. Garcia and A. Carrel, Precision on a roll : DGPS solutions for heavy machinery, GPS World magazine – January 2004
Articles de magazines technico-professionnels nationaux
D. Bétaille, Géolocalisation et perception pour la conduite automatisée au bénéfice de la sécurité et la fiabilité, RGRA, No. 955, pp. 38-39 – Juin 2018
J.-M. Martin, F. Menant, D. Meignen, X. Phelippeau, E. Michaud, S. Chauveau, D. Bétaille et M. Ortiz, Evaluation du réseau secondaire par l’utilisation de véhicules traceurs - L’application MIRANDA, RGRA, No. 929, pp. 26-31 – Juillet-Août 2015
M. Voyer, D. Bétaille and F. Peyret, Amélioration de la position GNSS en ville par la méthode des tranchées urbaines, Géomatique Expert, No. 93, pp. 36-49 – Juillet-Août 2013
P. Cross, S.J. Edwards, J. Barnes and D. Bétaille, A methodology for benchmarking real time GPS, Hydrographic Journal, Vol. 35, No. 94, ISSN : 0309-7846 – October 1999 (Article lauréat du Hydrographic Journal Best Paper 1999.)
Publications en conférences internationales à comité de lecture et actes
Communications en workshops internationaux
M. Ortiz, D. Bétaille, F. Peyret, O.M. Lykkja and S.-P. Oseth, Assessment of End-To-End performances of a GNSS-based Road User Charging System, IEEE AESS & ENC GNSS Congress – Helsinki – workshop : SaPPART – May-June 2016
D. Bétaille, F. Peyret, M. Ortiz, O.M. Lykkja and S.-P. Oseth, Position error modelling for sensitivity analysis of GNSS road applications, ENC GNSS Congress – Helsinki – workshop : SaPPART – May-June 2016
D. Bétaille, S. Peyraud, F. Mougel, S. Renault, M. Ortiz, D. Meizel and F. Peyret, Using road constraints to progress in real-time NLOS detection, IEEE IV Symposium – workshop : navigation, perception, accurate positioning and mapping for intelligent vehicles – Alcalá de Henares – June 2012
C. Piñana-Diaz, R. Toledo-Moreo, A.-F. Gómez-Skarmeta, D. Bétaille and F. Peyret, Elevation-enhanced-map-based GPS Non-Line-Of-Sight detection in urban environments, IEEE IV Symposium – workshop : navigation, perception, accurate positioning and mapping for intelligent vehicles – Alcalá de Henares – June 2012
D. Bouvet, G. Garcia, B.J. Gorham and D. Bétaille, 3-D localization of pavers in a computer integrated road construction context, IARP workshop : advances in robotics for mining and underground applications – Brisbane – October 2000
Communications en conférences internationales
A. Coiret, M. Kane, M. Fontaine, J. Cesbron and D. Bétaille, In-tire load estimation for autonomous vehicle safe driving strategies, AIIT 3rd International Congress on New Scenarios for Transport Infrastructure and Systems : TIS – Roma – September 2022
D. Bétaille and B. Jacob, Paving the way to use WIM systems for direct enforcement in France, Transportation Research Board – Washington – January 2022
D. Rivoal, Q. Bossard and D. Bétaille, A benchmark of the GPS+Galileo F9P receiver, 14th Annual Baska GNSS Conference – Krk island Croatia – May 2021
A. Coiret, M. Fontaine, J. Cesbron, V. Baltazart, D. Bétaille, D. Coudouel and E. Léa, Vehicle wheel load estimation with fiber optical contact patch elongation measurement, CETRA – Pula Croatia – May 2020
M. Fontaine, X. Chapeleau, V. Baltazart, I. Guéguen, L.-M. Cottineau, J. Cesbron, D. Bétaille and D. Coudouel, Static in-tire circumferential strain signature using Rayleigh-scattering fiber optic technology, Transport Research Arena Europe – Helsinki – April 2020
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, Extended Kalman Filter (EKF) innovation-based integrity monitoring scheme with C/N0 Weighting, IEEE RTSI Forum – Palermo – September 2018
D. Bétaille, M. Ortiz, G. Velez and O. Otaegui, Standardization issues related to hybrid GNSS positioning, ITS World Congress – Copenhagen – September 2018
S. Strataki, D. Bétaille and U. Hugentobler, Assessment of dynamic geo-positioning using multi-constellation GNSS in challenging environments, Conference on Sustainable Urban Mobility – Skiathos island – May 2018
D. Bétaille, A. Stern, M. Ortiz and L. Ruotsalainen, Autonomous vehicles: get necessary redundancy in positioning with enhanced GNSS and maps, ITS World Congress – Montreal – October 2017
F. Taia-Alaoui, V. Renaudin and D. Bétaille, Points of interest detection for map-aided PDR in combined outdoor-indoor spaces, IEEE IPIN Congress – Sapporo – September 2017
D. Bétaille, Paving the way for future use of the Urban Trench model along with a lane level road map, IEEE AESS & ENC GNSS Congress – Lausanne – May 2017
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, Evaluation and comparison of GNSS navigation algorithms including FDE for urban transport applications, ION International Technical Meeting – Monterey, CA – January 2017
F. Taia-Alaoui, D. Bétaille and V. Renaudin, A multi-hypothesis particle filtering approach for pedestrian dead reckoning, IEEE IPIN Congress – Alcalá de Henares – October 2016
F. Menant, J.-M. Martin, D. Meignen, D. Bétaille and M. Ortiz, Using Probe Vehicles for Pavement Monitoring: Experimental Results from Tests Performed on a Road Network, Transport Research Arena Europe – Warsow – April 2016
F. Peyret, J. Monsifrot, D. Bétaille and C. Moriana-Varo, How GNSS performance standardisation can support the deployment of critical its applications, ITS World Congress – Bordeaux – October 2015
D. Bétaille, S. Miquel, F. Godan and F. Peyret, 3D-city-model-aided GNSS accurate positioning with integrity provision using simplified geometry of buildings, ENC GNSS Congress – Bordeaux – April 2015
T. Serre, C. Naude, M. Guilbot, M. Dubois-Lounis, D. Lechner, F. Menant, J.-M. Martin, D. Meignen, V. Ledoux, P. Subirats, E. Violette, Y. Bonin, M. Ortiz, D. Bétaille, W. Guillemaud and N. Hautière, Towards a single system architecture for road defects monitoring and near-miss accidents data collection - MIRANDA / SVRAI, FEHRL Infrastructure Research Meeting – Brussels – April 2015
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and F. Godan, Improving accuracy and integrity with a probabilistic Urban Trench modeling, ION GNSS+, 27th International Technical Meeting of the Satellite Division – Tampa, FL – September 2014
D. Bétaille, F. Peyret and M. Ortiz, How to enhance accuracy and integrity of satellite positioning for mobility pricing in cities : the Urban Trench method, Transport Research Arena Europe – Paris – April 2014
F. Peyret, D. Bétaille, M. Ortiz, S. Miquel and L. Fontenay, How to improve GNSS positioning quality of service for demanding ITS in city environments by using 3D digital maps, ITS World Congress – Vienna – October 2012
R.-M. Hage, D. Bétaille, F. Peyret and D. Meizel, Unscented Kalman filter for estimating urban network travel time, 15th meeting of the European Working Group on Transportation – Paris – September 2012
R.-M. Hage, D. Bétaille, F. Peyret, D. Meizel and J.-Ch. Smal, Unscented Kalman filter for urban link travel time estimation with mid-link sinks and sources, IEEE ITS Conference – Anchorage, AK – September 2012
C. Piñana-Diaz, R. Toledo-Moreo and D. Bétaille, GPS Multipath Detection and Exclusion with Elevation-Enhanced Maps, IEEE ITS Conference – Washington, DC – October 2011
F. Peyret, D. Bétaille and F. Mougel, Non-Line-Of-Sight GNSS signal detection using an on-board 3D model of buildings, 11th International Conference on ITS Communication – Saint-Petersburg – August 2011
R.-M. Hage, D. Bétaille, E. le Carpentier, F. Peyret and D. Meizel, Link travel time estimation in urban areas by detectors and probe vehicles fusion, 2nd international conference on Models and Technologies for ITS – Leuven – June 2011
F. Peyret, W. Vigneau and D. Bétaille, EGNOS-On-The-Road : what can be expected from EGNOS compared to GPS for road traffic management services, ITS World Congress – Busan – October 2010
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, Robustification of a map aided location process using road direction, IEEE ITS Conference – Madeira – October 2010
P. Rodriguez de Andres, D. Bétaille and R. Toledo, Validation of an affordable real time lane-level positioning system for cooperative vehicle-infrastructure systems, ION 23rd International Technical Meeting of the Satellite Division – Portland, OR – September 2010
D. Bétaille, J. Soubielle and M. Crozes, Tight coupling of GPS-EGNOS and robot odometry with integrity provision, Space Applications Conference in Toulouse Space Show – Toulouse – June 2010
R. Toledo-Moreo, D. Bétaille and F. Peyret, Integrity provision for map-matched positioning of road vehicles at lane level, IEEE ITS Conference – Saint-Louis, MO – October 2009
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, Lane-Level Positioning using Particle Filtering, IEEE ITS Conference – Saint-Louis, MO – October 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán and D. Bétaille, Automotive Localization Integrity Based on Trajectory Monitoring, IROS Symposium – Saint-Louis, MO – October 2009
G. Duchâteau, O. Nouvel, W. Vigneau, D. Bétaille, F. Peyret and H. Secrétan, How to assess and improve satellite positioning performances in urban environments, ITS World Congress – Stockholm – September 2009
R. Toledo-Moreo, D. Bétaille and F. Peyret, Road vehicle positioning at the lane level based on GNSS integration with enhanced maps, ITS World Congress – Stockholm – September 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán, D. Bétaille and F. Peyret, Characterization of GPS multipath for passenger vehicles across urban environments, ENC GNSS Congress – Napoli – May 2009
J. Soubielle, D. Bétaille and W. Vigneau, EGNOS and MEMS sensors tight hybridization for automatic transport systems, 4th ESA workshop on Satellite Navigation User Equipment Technologies, NAVITEC – Noordwijk – December 2008
F. Peyret, J. Laneurit and D. Bétaille, A novel system using enhanced digital maps and WAAS for a lane-level positioning, ITS World Congress – New York – November 2008
D. Bétaille, R. Toledo-Moreo and J. Laneurit, Making an Enhanced Map for Lane Location Based Services, IEEE ITS Conference – Beijing – October 2008
C. Fouque, Ph. Bonnifait and D. Bétaille, Enhancement of global vehicle localization using navigable road maps and dead-reckoning, IEEE ION PLANS Congress – Monterey, CA – May 2008
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán, F. Peyret and D. Bétaille, Performance evaluation of fault detection algorithms as applied to automotive localisation, ENC GNSS Congress – Toulouse – April 2008
D. Bétaille, F. Peyret, O. Nouvel, W. Vigneau, G. Duchâteau and H. Secrétan, How to produce a reference trajectory for studying GNSS errors in urban environments, ENC GNSS Congress – Toulouse – April 2008
F. Peyret, D. Bétaille, J. Laneurit and R. Toledo-Moreo, Lane-level positioning for cooperative systems using EGNOS and enhanced digital maps, ENC GNSS Congress – Toulouse – April 2008
D. Bétaille, A. Chapelon, B. Lusetti, M. Kais, and D. Millescamps, High integrity reference trajectory for benchmarking land navigation data fusion methods, IEEE IV Symposium – Istanbul – June 2007
M. Schlingelhof, D. Bétaille, Ph. Bonnifait, Ph. Poiré and K. Demaseure, Advanced positioning technology approach for Cooperative Vehicle Infrastructure Systems (CVIS), ITS Europe Congress – Aalborg – June 2007
M.-A. Zamora-Izquierdo, D. Bétaille and F. Peyret, About the interest of linearised Kalman filter for low-cost GPS-based positioning system for land vehicles, ITS World Congress – London – October 2006
D. Bétaille, Y. Goyat and F. Menant, Kinematic GPS calibration of roadside systems used for local metrology of vehicles trajectories in curve, Transport Research Arena Europe – Göteborg – June 2006
M. Kais, D. Millescamps, D. Bétaille, B. Lusetti and A. Chapelon, A multi-sensor acquisition architecture and real-time reference for sensor and fusion method benchmarking, IEEE IV Symposium – Tokyo – June 2006
D. Bétaille, M. Kais, Ph. Bonnnifait and F. Peyret, Development of loosely-coupled FOG/DGPS and FOG/RTK systems for ADAS and a methodology to assess their real-time Performance, IEEE IV Symposium – Las Vegas, NE – June 2005
P. Cross, D. Bétaille and F. Peyret, Improving GPS accuracy for construction applications through phase multipath mitigation, International Symposium on GNSS – Tokyo – October 2003
D. Bétaille, A testing methodology for GPS phase multipath mitigation techniques, ION 16th International Technical Meeting of the Satellite Division – Portland, OR – September 2003 (Article lauréat de la Student Paper Sponsorship competition.)
D. Bétaille, J. Maenpa, H.-J. Euler and P. Cross, Overcoming the limitations of the phase multipath mitigation window, ION 16th International Technical Meeting of the Satellite Division – Portland, OR – September 2003
D. Bétaille, J. Maenpa, H.-J. Euler and P. Cross, A new approach to GPS phase multipath mitigation, ION National Technical Meeting – Anaheim, CA – January 2003
D. Bétaille and Ph. Bonnifait, Vehicles modeling and multi-sensor smoothing techniques for post-processed vehicles localisation, ION 15th International Technical Meeting of the Satellite Division – Portland, OR – September 2002
D. Bouvet, G. Garcia, B.J. Gorham and D. Bétaille, Precise 3-D localization by automatic laser theodolite and odometer for civil-engineering machines, IEEE ICRA – Seoul – May 2001
D. Bétaille and Ph. Bonnifait, Road maintenance vehicles location using DGPS, map-matching and dead reckoning : experimental results of a smoothed EKF, IAIN World Congress and ION 56th Annual Meeting – San Diego, CA – June 2000
D. Bétaille and F. Peyret, A simulator for road construction equipment, 14th ISARC (International Symposium on Automation and Robotics for Construction) – Pittsburgh, PA – June 1997
F. Peyret, D. Bétaille and G. Hintzy, High-precision application of GPS in the field of real-time equipment positioning, 14th ISARC (International Symposium on Automation and Robotics for Construction), pp. 2-10 – Pittsburgh, PA – June 1997 (Article lauréat de l’ISARC Best Theory Paper 1997.)
Communication par affiche en conférence internationale
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and L. Fontenay, GNSS accurate positioning including satellite visibility check in a multiple hypotheses 3D mapping framework, ENC GNSS Congress – Vienna – April 2013
Publications en conférences nationales à comité de lecture et actes
D. Bétaille, B. Jacob and V. Dolcemascolo, Le contrôle-sanction automatisé des poids lourds en surcharge – Montrouge – Janvier 2022
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion, Journées scientifiques d’URSI France – Paris – Mars 2018
F. Taia-Alaoui, D. Bétaille and V. Renaudin, A multi-hypothesis particle filtering approach for pedestrian dead reckoning, workshop GdR ISIS : Méthodes de traitement du signal avancées pour la navigation et la localisation – Toulouse – Septembre 2016
D. Bétaille, P. Nicolle et S.-S. Ieng, Trajectographie submétrique par couplage DGPS, carte précise des marquages et vision, Conférence PRAC – Paris – Mai 2010
A. Selloum, E. le Carpentier, D. Bétaille et F. Peyret, Localisation 2D d’un mobile sur une carte numérique précise, Congrès du GRETSI – Dijon – Septembre 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán and D. Bétaille, Automotive localization integrity using proprioceptive and pseudo-ranges measurements, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
E. Lucet, D. Bétaille, D.-F. Nahimana, M. Ortiz, D. Sallé and J. Canou, Real-time 2D localization of a car-like robot using dead-reckoning and GPS, with satellite masking prediction, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, 2D vehicle localisation using an enhanced map, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
D. Bétaille et Ph. Bonnifait, Localisation de véhicules d’auscultation de routes avec l’utilisation de capteurs proprioceptrifs, d’un récepteur DGPS ou de données cartographiques, Journées GPS 2000, organisée par le Laboratoire Central des Ponts et Chaussées – Nantes – Juin 2000, pp. 39-52
Communication par affiche en conférence nationale
D. Bétaille, B. Jacob, E. Klein, et N. Grignard, Contrôle Sanction Automatisé des Surcharges, Congrès ATEC-ITS France – Montrouge – Janvier 2020
Publications
HDR, PhD
Habilitation à Diriger les Recherches : David F. Bétaille, « Localisation de véhicule par satellites, couplée à la navigation à l’estime et aux données cartographiques », Université de Nantes, Avril 2014
Thèse de doctorat : David F. Bétaille, « Assessment and Improvement of the Capabilities of a Window Correlator to Model GPS Multipath Phase Errors », University of London, February 2004
Ouvrage scientifique, chapitre d’ouvrage
Françoise Duquenne, Serge Botton, François Peyret, David Bétaille, Pascal Willis, GPS – localisation et navigation par satellites, 2ème édition, Hermès-science Lavoisier, ISBN : 2-7462-1090-8, 2005 : co-auteur du chap. 3, « Le positionnement dynamique », pp. 161-252, et auteur, dans le chap. 4, « Les applications autres que la localisation », d’une partie consacrée à la détermination d’attitude, pp. 259-271
Guidelines « Performance assessment of positioning terminals », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en mars 2018.
Handbook « Assessment of positioning performance in ITS applications », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en juin 2017.
White Paper « Better use of Global Navigation Satellite Systems for safer and greener transport », ouvrage collectif publié par l’action COST SaPPART (Satellite Positioning Performance Assessment for Road Transport) en septembre 2015.
Coordination d’ouvrage
R. Toledo-Moreo, D. Bétaille and M.-A. Sotelo, coordination & guest editorial of the special issue on IEEE IV 2012 workshops – part 1 of 2, IEEE Intelligent Transportation Systems Magazine, Vol. 5, No. 3 – Fall 2013
Articles de revues à comité de lecture
Revues internationales
M. Fontaine, A. Coiret, J. Cesbron, V. Baltazart and D. Bétaille, In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions, MDPI Sensors, 2021, 21(20), 6874, doi:10.3390/s21206874
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, GNSS Integrity Monitoring Schemes for Terrestrial Applications in Harsh Environments, IEEE ITS Magazine, Special Issue, Vol. 12, No. 3, pp. 81-91 – Fall 2020
B. Flade, J. Eggert, A. Koppert, G. Velez, O. Otaegui, A. Das, G Dubbelman and D. Bétaille, Vision-Enhanced Low-Cost Localization in Crowdsourced Maps, IEEE ITS Magazine, Special Issue, Vol. 12, No. 3, pp. 70-80 – Fall 2020
S. Strataki, D. Bétaille and U. Hugentobler, Assessment of dynamic geo-positioning using multi-constellation GNSS in challenging environments, Advances in Intelligent Systems and Computing – May 2019
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, GNSS Position Integrity in Urban Environments : A Review of Literature, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. PP, No. 99, pp. 1-17 – January 2018
F. Taia-Alaoui, D. Bétaille and V. Renaudin, Pedestrian dead reckoning navigation with the help of A*-based routing graphs in large unconstrained spaces, Hindawi Wireless Communications and Mobile Computing, ISSN : 1530-8677, doi:10.1155/2017/7951346, pp. 1-10 – July 2017
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and F. Godan, Improving accuracy and integrity with a probabilistic Urban Trench modeling, Navigation, ISSN : 0028-1522, Vol. 63, No. 3, pp. 283-294 – Fall 2016
D. Bétaille, F. Peyret and M. Voyer, Applying Standard Digital Map Data in Map-aided, Lane-level GNSS Location, Journal of Navigation, ISSN : 0373-4633, doi:10.1017/S0373463315000132, Vol. 68, No. 5, pp. 827-847 – September 2015
F. Peyret, D. Bétaille, C. Piñana-Diaz, R. Toledo-Moreo, A.-F. Gómez-Skarmeta and M. Ortiz, GNSS autonomous localization : Non-Line-Of-Sight satellite detection based on digital maps of city environments, IEEE Robotics and Automation Magazine, Vol. 21, No. 1 – March 2014
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and L. Fontenay, A new modelling based on urban trenches to improve GNSS positioning Quality of Service in cities, IEEE Intelligent Transportation Systems Magazine, Vol. 5, No. 3 – Fall 2013
S. Peyraud, D. Bétaille, S. Renault, M. Ortiz, F. Mougel, D. Meizel and F. Peyret, About Non-Line-Of-Sight Satellite Detection and Exclusion in a 3D Map-Aided Localization Algorithm, Sensors, ISSN : 1424-8220, Vol. 13, pp. 829-847 – January 2013
D. Bétaille and R. Toledo-Moreo, Creating enhanced maps for lane-level vehicle navigation, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. 11, No. 4, pp. 786-798 – December 2010
R. Toledo-Moreo, D. Bétaille and F. Peyret, Lane level integrity provision for navigation and map-matching with GNSS, dead-reckoning and enhanced maps, IEEE Transactions on ITS, ISSN : 1524-9050, Vol. 11, No. 1, pp. 100-112 – March 2010
R. Toledo-Moreo, D. Bétaille, F. Peyret and J. Laneurit, Fusing GNSS, dead-reckoning and enhanced maps for road vehicle lane-level navigation, IEEE Journal of selected topics in signal processing, ISSN : 1932-4553, Vol. 3, No. 5, pp. 798-809 – October 2009
M. Schlingelhof, D. Bétaille, Ph. Bonnifait and K. Demaseure, Advanced positioning technologies for co-operative systems, IET Intelligent Transport Systems revue, ISSN : 1751-956X, Vol. 2, No. 2, pp. 81-91 – June 2008
M.-A. Zamora-Izquierdo, D. Bétaille, F. Peyret and C. Joly, Comparative study of Extended Kalman Filter, Linearised Kalman Filter and Particle Filter applied to low-cost GPS-based hybrid positioning system for land vehicles, Int. J. Intelligent Information and Database Systems, ISSN : 1751-5858, Vol. 2, No. 2, pp.149-166 – March 2008
D. Bétaille, P. Cross and H.-J. Euler, Assessment and improvement of the capabilities of a window correlator to model GPS multipath phase errors, IEEE Transactions on Aerospace and Electronic Systems, ISSN : 0018-9251, Vol. 42, No. 2, pp. 705-717 – April 2006
F. Peyret, D. Bétaille and G. Hintzy, High-precision application of GPS in the field of real-time equipment positioning, Automation in Construction, ISSN : 0926-5805, Vol. 9, No. 3, pp. 299-314 – May 2000
P. Cross, S.J. Edwards, J. Barnes and D. Bétaille, A methodology for benchmarking real time GPS, Survey Review, ISSN : 0039-6265, Vol. 35, No. 272, pp. 163-174 – April 1999
Revues nationales
D. Bétaille, J.-P. Tarel, S.-S. Ieng, C. Meurie, S. Ambellouis, D. Gruyer and J. Marais, Localisation pour la conduite automatisée, Revue d’Electricité et d’Electronique, No. 2, 2023
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion (FDE), URSI-Revue d’Electricité et d’Electronique, ISSN : 2270-7042, Geolocation and Navigation in Space and Time, ursi-france.sciencesconf.org/187025 – March 2018
D. Bétaille, Gyrolis : logiciel de localisation de véhicule en post-traitement par couplage GPS - gyromètre - odomètre, Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 272, pp. 75-87 – Octobre-Novembre 2008
C. Joly, D. Bétaille et F. Peyret, Étude comparative des techniques de filtrage non-linéaire appliquées à la localisation 2D d’un véhicule en temps réel, Revue Traitement du Signal, ISSN : 0765-0019, Vol. 25, No. 3, pp. 201-220 – Mai-Juin 2008
D. Bétaille et K.-I. Fujino, Localisation des engins de viabilité hivernale, note technique du Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 219, pp. 75-77 – Janvier-Février 1999
F. Peyret, D. Bétaille et Ch. Lemaire, Mise en service de la station d’étude des systèmes de localisation SESSYL, Bulletin des Laboratoires des Ponts et Chaussées, ISSN : 1269-1496, No. 205, pp. 105-109 – Septembre-Octobre 1996
Articles sans comité de lecture
Articles de magazines technico-professionnels internationaux
D. Bétaille, S. Miquel, F. Godan and F. Peyret, 3D-city-model-aided GNSS accurate positioning with integrity provision using simplified geometry of buildings, Coordinates – September 2015
M. Ortiz, V. Renaudin, F. Peyret and D. Bétaille, Using a reference vehicle for solving GNSS localization challenges, Inside GNSS – September-October 2013
F. Peyret, D. Bétaille, G. Garcia and A. Carrel, Precision on a roll : DGPS solutions for heavy machinery, GPS World magazine – January 2004
Articles de magazines technico-professionnels nationaux
D. Bétaille, Géolocalisation et perception pour la conduite automatisée au bénéfice de la sécurité et la fiabilité, RGRA, No. 955, pp. 38-39 – Juin 2018
J.-M. Martin, F. Menant, D. Meignen, X. Phelippeau, E. Michaud, S. Chauveau, D. Bétaille et M. Ortiz, Evaluation du réseau secondaire par l’utilisation de véhicules traceurs - L’application MIRANDA, RGRA, No. 929, pp. 26-31 – Juillet-Août 2015
M. Voyer, D. Bétaille and F. Peyret, Amélioration de la position GNSS en ville par la méthode des tranchées urbaines, Géomatique Expert, No. 93, pp. 36-49 – Juillet-Août 2013
P. Cross, S.J. Edwards, J. Barnes and D. Bétaille, A methodology for benchmarking real time GPS, Hydrographic Journal, Vol. 35, No. 94, ISSN : 0309-7846 – October 1999 (Article lauréat du Hydrographic Journal Best Paper 1999.)
Publications en conférences internationales à comité de lecture et actes
Communications en workshops internationaux
D. Bétaille, C. Meurie and Yann Cocheril, Vision- and map-based non-line-of-sight satellites hybridized processing, IEEE ITS Conference – workshop iLOC : High-integrity Localization for Automated Vehicles – Bilbao – September 2023
M. Ortiz, D. Bétaille, F. Peyret, O.M. Lykkja and S.-P. Oseth, Assessment of End-To-End performances of a GNSS-based Road User Charging System, IEEE AESS & ENC GNSS Congress – Helsinki – workshop : SaPPART – May-June 2016
D. Bétaille, F. Peyret, M. Ortiz, O.M. Lykkja and S.-P. Oseth, Position error modelling for sensitivity analysis of GNSS road applications, ENC GNSS Congress – Helsinki – workshop : SaPPART – May-June 2016
D. Bétaille, S. Peyraud, F. Mougel, S. Renault, M. Ortiz, D. Meizel and F. Peyret, Using road constraints to progress in real-time NLOS detection, IEEE IV Symposium – workshop : navigation, perception, accurate positioning and mapping for intelligent vehicles – Alcalá de Henares – June 2012
C. Piñana-Diaz, R. Toledo-Moreo, A.-F. Gómez-Skarmeta, D. Bétaille and F. Peyret, Elevation-enhanced-map-based GPS Non-Line-Of-Sight detection in urban environments, IEEE IV Symposium – workshop : navigation, perception, accurate positioning and mapping for intelligent vehicles – Alcalá de Henares – June 2012
D. Bouvet, G. Garcia, B.J. Gorham and D. Bétaille, 3-D localization of pavers in a computer integrated road construction context, IARP workshop : advances in robotics for mining and underground applications – Brisbane – October 2000
Communications en conférences internationales
D. Bétaille, B. Jacob, M. Bouteldja and N. Grignard, Direct enforcement of overloads : extensive full-scale tests and certification procedure of WIM systems, PIARC World Road Congress – Prague – October 2023
A. Coiret, M. Kane, M. Fontaine, J. Cesbron and D. Bétaille, In-tire load estimation for autonomous vehicle safe driving strategies, AIIT 3rd International Congress on New Scenarios for Transport Infrastructure and Systems : TIS – Roma – September 2022
D. Bétaille, B. Jacob and V. Dolcemascolo, WIM for direct enforcement in France, International Society for Weigh-In-Motion Seminar – Pretoria – July 2022
D. Bétaille and B. Jacob, Paving the way to use WIM systems for direct enforcement in France, Transportation Research Board – Washington – January 2022
D. Rivoal, Q. Bossard and D. Bétaille, A benchmark of the GPS+Galileo F9P receiver, 14th Annual Baska GNSS Conference – Krk island Croatia – May 2021
A. Coiret, M. Fontaine, J. Cesbron, V. Baltazart, D. Bétaille, D. Coudouel and E. Léa, Vehicle wheel load estimation with fiber optical contact patch elongation measurement, CETRA – Pula Croatia – May 2020
M. Fontaine, X. Chapeleau, V. Baltazart, I. Guéguen, L.-M. Cottineau, J. Cesbron, D. Bétaille and D. Coudouel, Static in-tire circumferential strain signature using Rayleigh-scattering fiber optic technology, Transport Research Arena Europe – Helsinki – April 2020
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, Extended Kalman Filter (EKF) innovation-based integrity monitoring scheme with C/N0 Weighting, IEEE RTSI Forum – Palermo – September 2018
D. Bétaille, M. Ortiz, G. Velez and O. Otaegui, Standardization issues related to hybrid GNSS positioning, ITS World Congress – Copenhagen – September 2018
S. Strataki, D. Bétaille and U. Hugentobler, Assessment of dynamic geo-positioning using multi-constellation GNSS in challenging environments, Conference on Sustainable Urban Mobility – Skiathos island – May 2018
D. Bétaille, A. Stern, M. Ortiz and L. Ruotsalainen, Autonomous vehicles: get necessary redundancy in positioning with enhanced GNSS and maps, ITS World Congress – Montreal – October 2017
F. Taia-Alaoui, V. Renaudin and D. Bétaille, Points of interest detection for map-aided PDR in combined outdoor-indoor spaces, IEEE IPIN Congress – Sapporo – September 2017
D. Bétaille, Paving the way for future use of the Urban Trench model along with a lane level road map, IEEE AESS & ENC GNSS Congress – Lausanne – May 2017
N. Zhu, J. Marais, D. Bétaille and M. Berbineau, Evaluation and comparison of GNSS navigation algorithms including FDE for urban transport applications, ION International Technical Meeting – Monterey, CA – January 2017
F. Taia-Alaoui, D. Bétaille and V. Renaudin, A multi-hypothesis particle filtering approach for pedestrian dead reckoning, IEEE IPIN Congress – Alcalá de Henares – October 2016
F. Menant, J.-M. Martin, D. Meignen, D. Bétaille and M. Ortiz, Using Probe Vehicles for Pavement Monitoring: Experimental Results from Tests Performed on a Road Network, Transport Research Arena Europe – Warsow – April 2016
F. Peyret, J. Monsifrot, D. Bétaille and C. Moriana-Varo, How GNSS performance standardisation can support the deployment of critical its applications, ITS World Congress – Bordeaux – October 2015
D. Bétaille, S. Miquel, F. Godan and F. Peyret, 3D-city-model-aided GNSS accurate positioning with integrity provision using simplified geometry of buildings, ENC GNSS Congress – Bordeaux – April 2015
T. Serre, C. Naude, M. Guilbot, M. Dubois-Lounis, D. Lechner, F. Menant, J.-M. Martin, D. Meignen, V. Ledoux, P. Subirats, E. Violette, Y. Bonin, M. Ortiz, D. Bétaille, W. Guillemaud and N. Hautière, Towards a single system architecture for road defects monitoring and near-miss accidents data collection - MIRANDA / SVRAI, FEHRL Infrastructure Research Meeting – Brussels – April 2015
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and F. Godan, Improving accuracy and integrity with a probabilistic Urban Trench modeling, ION GNSS+, 27th International Technical Meeting of the Satellite Division – Tampa, FL – September 2014
D. Bétaille, F. Peyret and M. Ortiz, How to enhance accuracy and integrity of satellite positioning for mobility pricing in cities : the Urban Trench method, Transport Research Arena Europe – Paris – April 2014
F. Peyret, D. Bétaille, M. Ortiz, S. Miquel and L. Fontenay, How to improve GNSS positioning quality of service for demanding ITS in city environments by using 3D digital maps, ITS World Congress – Vienna – October 2012
R.-M. Hage, D. Bétaille, F. Peyret and D. Meizel, Unscented Kalman filter for estimating urban network travel time, 15th meeting of the European Working Group on Transportation – Paris – September 2012
R.-M. Hage, D. Bétaille, F. Peyret, D. Meizel and J.-Ch. Smal, Unscented Kalman filter for urban link travel time estimation with mid-link sinks and sources, IEEE ITS Conference – Anchorage, AK – September 2012
C. Piñana-Diaz, R. Toledo-Moreo and D. Bétaille, GPS Multipath Detection and Exclusion with Elevation-Enhanced Maps, IEEE ITS Conference – Washington, DC – October 2011
F. Peyret, D. Bétaille and F. Mougel, Non-Line-Of-Sight GNSS signal detection using an on-board 3D model of buildings, 11th International Conference on ITS Communication – Saint-Petersburg – August 2011
R.-M. Hage, D. Bétaille, E. le Carpentier, F. Peyret and D. Meizel, Link travel time estimation in urban areas by detectors and probe vehicles fusion, 2nd international conference on Models and Technologies for ITS – Leuven – June 2011
F. Peyret, W. Vigneau and D. Bétaille, EGNOS-On-The-Road : what can be expected from EGNOS compared to GPS for road traffic management services, ITS World Congress – Busan – October 2010
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, Robustification of a map aided location process using road direction, IEEE ITS Conference – Madeira – October 2010
P. Rodriguez de Andres, D. Bétaille and R. Toledo, Validation of an affordable real time lane-level positioning system for cooperative vehicle-infrastructure systems, ION 23rd International Technical Meeting of the Satellite Division – Portland, OR – September 2010
D. Bétaille, J. Soubielle and M. Crozes, Tight coupling of GPS-EGNOS and robot odometry with integrity provision, Space Applications Conference in Toulouse Space Show – Toulouse – June 2010
R. Toledo-Moreo, D. Bétaille and F. Peyret, Integrity provision for map-matched positioning of road vehicles at lane level, IEEE ITS Conference – Saint-Louis, MO – October 2009
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, Lane-Level Positioning using Particle Filtering, IEEE ITS Conference – Saint-Louis, MO – October 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán and D. Bétaille, Automotive Localization Integrity Based on Trajectory Monitoring, IROS Symposium – Saint-Louis, MO – October 2009
G. Duchâteau, O. Nouvel, W. Vigneau, D. Bétaille, F. Peyret and H. Secrétan, How to assess and improve satellite positioning performances in urban environments, ITS World Congress – Stockholm – September 2009
R. Toledo-Moreo, D. Bétaille and F. Peyret, Road vehicle positioning at the lane level based on GNSS integration with enhanced maps, ITS World Congress – Stockholm – September 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán, D. Bétaille and F. Peyret, Characterization of GPS multipath for passenger vehicles across urban environments, ENC GNSS Congress – Napoli – May 2009
J. Soubielle, D. Bétaille and W. Vigneau, EGNOS and MEMS sensors tight hybridization for automatic transport systems, 4th ESA workshop on Satellite Navigation User Equipment Technologies, NAVITEC – Noordwijk – December 2008
F. Peyret, J. Laneurit and D. Bétaille, A novel system using enhanced digital maps and WAAS for a lane-level positioning, ITS World Congress – New York – November 2008
D. Bétaille, R. Toledo-Moreo and J. Laneurit, Making an Enhanced Map for Lane Location Based Services, IEEE ITS Conference – Beijing – October 2008
C. Fouque, Ph. Bonnifait and D. Bétaille, Enhancement of global vehicle localization using navigable road maps and dead-reckoning, IEEE ION PLANS Congress – Monterey, CA – May 2008
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán, F. Peyret and D. Bétaille, Performance evaluation of fault detection algorithms as applied to automotive localisation, ENC GNSS Congress – Toulouse – April 2008
D. Bétaille, F. Peyret, O. Nouvel, W. Vigneau, G. Duchâteau and H. Secrétan, How to produce a reference trajectory for studying GNSS errors in urban environments, ENC GNSS Congress – Toulouse – April 2008
F. Peyret, D. Bétaille, J. Laneurit and R. Toledo-Moreo, Lane-level positioning for cooperative systems using EGNOS and enhanced digital maps, ENC GNSS Congress – Toulouse – April 2008
D. Bétaille, A. Chapelon, B. Lusetti, M. Kais, and D. Millescamps, High integrity reference trajectory for benchmarking land navigation data fusion methods, IEEE IV Symposium – Istanbul – June 2007
M. Schlingelhof, D. Bétaille, Ph. Bonnifait, Ph. Poiré and K. Demaseure, Advanced positioning technology approach for Cooperative Vehicle Infrastructure Systems (CVIS), ITS Europe Congress – Aalborg – June 2007
M.-A. Zamora-Izquierdo, D. Bétaille and F. Peyret, About the interest of linearised Kalman filter for low-cost GPS-based positioning system for land vehicles, ITS World Congress – London – October 2006
D. Bétaille, Y. Goyat and F. Menant, Kinematic GPS calibration of roadside systems used for local metrology of vehicles trajectories in curve, Transport Research Arena Europe – Göteborg – June 2006
M. Kais, D. Millescamps, D. Bétaille, B. Lusetti and A. Chapelon, A multi-sensor acquisition architecture and real-time reference for sensor and fusion method benchmarking, IEEE IV Symposium – Tokyo – June 2006
D. Bétaille, M. Kais, Ph. Bonnifait and F. Peyret, Development of loosely-coupled FOG/DGPS and FOG/RTK systems for ADAS and a methodology to assess their real-time Performance, IEEE IV Symposium – Las Vegas, NE – June 2005
P. Cross, D. Bétaille and F. Peyret, Improving GPS accuracy for construction applications through phase multipath mitigation, International Symposium on GNSS – Tokyo – October 2003
D. Bétaille, A testing methodology for GPS phase multipath mitigation techniques, ION 16th International Technical Meeting of the Satellite Division – Portland, OR – September 2003 (Article lauréat de la Student Paper Sponsorship competition.)
D. Bétaille, J. Maenpa, H.-J. Euler and P. Cross, Overcoming the limitations of the phase multipath mitigation window, ION 16th International Technical Meeting of the Satellite Division – Portland, OR – September 2003
D. Bétaille, J. Maenpa, H.-J. Euler and P. Cross, A new approach to GPS phase multipath mitigation, ION National Technical Meeting – Anaheim, CA – January 2003
D. Bétaille and Ph. Bonnifait, Vehicles modeling and multi-sensor smoothing techniques for post-processed vehicles localisation, ION 15th International Technical Meeting of the Satellite Division – Portland, OR – September 2002
D. Bouvet, G. Garcia, B.J. Gorham and D. Bétaille, Precise 3-D localization by automatic laser theodolite and odometer for civil-engineering machines, IEEE ICRA – Seoul – May 2001
D. Bétaille and Ph. Bonnifait, Road maintenance vehicles location using DGPS, map-matching and dead reckoning : experimental results of a smoothed EKF, IAIN World Congress and ION 56th Annual Meeting – San Diego, CA – June 2000
D. Bétaille and F. Peyret, A simulator for road construction equipment, 14th ISARC (International Symposium on Automation and Robotics for Construction) – Pittsburgh, PA – June 1997
F. Peyret, D. Bétaille and G. Hintzy, High-precision application of GPS in the field of real-time equipment positioning, 14th ISARC (International Symposium on Automation and Robotics for Construction), pp. 2-10 – Pittsburgh, PA – June 1997 (Article lauréat de l’ISARC Best Theory Paper 1997.)
Communication par affiche en conférence internationale
D. Bétaille, F. Peyret, M. Ortiz, S. Miquel and L. Fontenay, GNSS accurate positioning including satellite visibility check in a multiple hypotheses 3D mapping framework, ENC GNSS Congress – Vienna – April 2013
Publications en conférences nationales à comité de lecture et actes
D. Bétaille, B. Jacob and V. Dolcemascolo, Le contrôle-sanction automatisé des poids lourds en surcharge – Montrouge – Janvier 2022
N. Zhu, D. Bétaille, J. Marais and M. Berbineau, GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion, Journées scientifiques d’URSI France – Paris – Mars 2018
F. Taia-Alaoui, D. Bétaille and V. Renaudin, A multi-hypothesis particle filtering approach for pedestrian dead reckoning, workshop GdR ISIS : Méthodes de traitement du signal avancées pour la navigation et la localisation – Toulouse – Septembre 2016
D. Bétaille, P. Nicolle et S.-S. Ieng, Trajectographie submétrique par couplage DGPS, carte précise des marquages et vision, Conférence PRAC – Paris – Mai 2010
A. Selloum, E. le Carpentier, D. Bétaille et F. Peyret, Localisation 2D d’un mobile sur une carte numérique précise, Congrès du GRETSI – Dijon – Septembre 2009
O. le Marchand, Ph. Bonnifait, J. Ibañez-Guzmán and D. Bétaille, Automotive localization integrity using proprioceptive and pseudo-ranges measurements, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
E. Lucet, D. Bétaille, D.-F. Nahimana, M. Ortiz, D. Sallé and J. Canou, Real-time 2D localization of a car-like robot using dead-reckoning and GPS, with satellite masking prediction, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
A. Selloum, D. Bétaille, E. le Carpentier and F. Peyret, 2D vehicle localisation using an enhanced map, workshop GdR Robotique : Localisation Précise pour les Transports Terrestres – Paris – Juin 2009
D. Bétaille et Ph. Bonnifait, Localisation de véhicules d’auscultation de routes avec l’utilisation de capteurs proprioceptrifs, d’un récepteur DGPS ou de données cartographiques, Journées GPS 2000, organisée par le Laboratoire Central des Ponts et Chaussées – Nantes – Juin 2000, pp. 39-52
Communication par affiche en conférence nationale
D. Bétaille, B. Jacob, E. Klein, et N. Grignard, Contrôle Sanction Automatisé des Surcharges, Congrès ATEC-ITS France – Montrouge – Janvier 2020